文章详情
文章详情
文章详情
文章详情
机器人可以配置为在您创建机器人时或在“触发器”窗格中编辑机器人时在集成之前和之后执行操作(称为触发器)。触
发器可以运行自定义 shell 脚本并发送电子邮件报告。
集成前脚本或集成后脚本可以使用您在创建机器人时在上一个工作表中定义的任何环境变量,或在编辑机器人时在参数窗
格中定义的任何环境变量。该脚本还可以使用任何Xcode Server 环境变量。
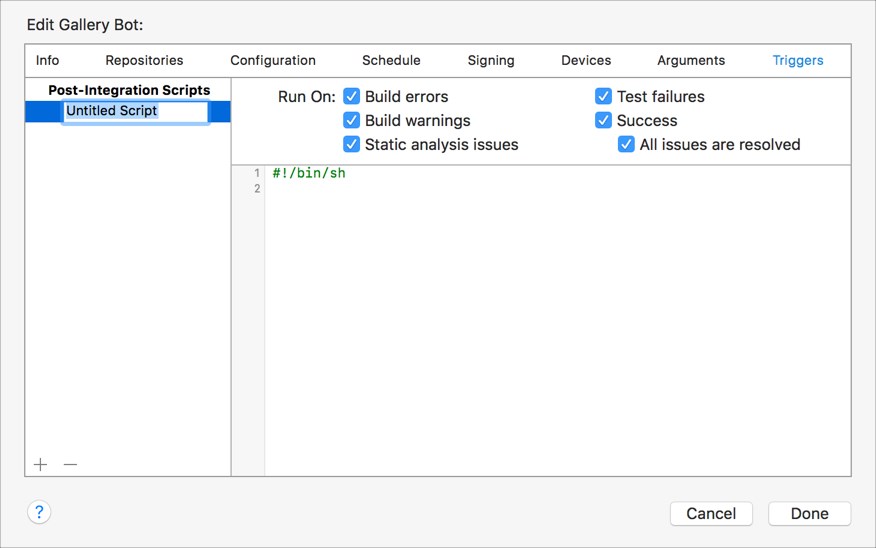
积分后触发器在积分后运行。
1.在左下角,单击添加按钮 (+) 并从弹出菜单中选择后集成脚本。
2.在左列中,输入触发器的标题。
3.在右侧的编辑器区域中输入脚本。
4.在编辑器上方,选中要触发脚本的事件的复选框。
集成后触发器可以配置为有条件地运行,例如成功、测试失败、构建错误、构建警告或静态分析警告。为您的集成选择适
当的条件复选框。